About: How Aware detects line-crossing events
Last modified: Thursday September 28, 2023.
The Avigilon Alta machine learning creates bounding boxes around detected objects (people or vehicles). Bounding boxes usually include the main mass of the object (a person's head and torso, or the main body of a vehicle) but might not include extremities, such as a person's feet, or the wheels of a vehicle.
For line-crossing algorithms to trigger, the machine learning focuses on the bottom half of the object (its bounding box). The algorithm detects a line-crossing event when a significant portion of the bottom half of the object crosses the line drawn on the camera views.
Setting line-crossing configurations on Pan-Tilt-Zoom (PTZ) cameras can produce unexpected results if the view is moved, as the position of the line remains static as the camera view changes.
Humans see the world around them in three dimensions, but camera-based systems see a two-dimensional representation of the same space. This means that when setting up line-crossing, the requirements for the camera system might seem unintuitive.
To improve line-crossing accuracy, ensure that you:
- Draw the line "on-the-ground", so that it interacts with the lower part of the object bounding box.
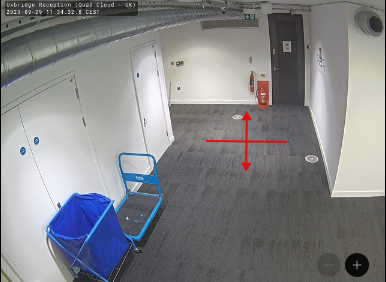
Draw lines "on-the-ground" - Draw the line so that it extends for some distance either side of the area you think the object will take.
This allows the line-cross detection to trigger if the object does not follow the ideal path.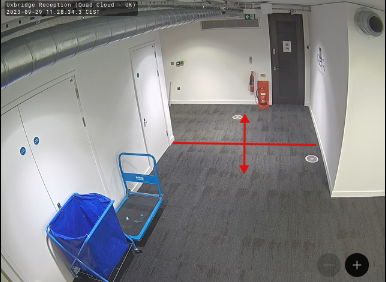
Draw lines so that the object moves through them, rather than around the line. - Draw the line so that the object is detected both before and after crossing the drawn line.
For example, do not draw the line close to a door, as the object might not be detected until after it has passed the drawn line. Instead, draw the line sufficiently far from the door so that the object can be detected before it crosses the drawn line, and still be detected after it has crossed the line. - Avoid drawing the line close to the edge of the camera view.
When the line-crossing is close to the edge of view, the system cannot detect the object on both sides of the line. - Do not draw the line in areas where the intended object (person or vehicle) is likely to be stationary for a period of time, as this could lead to false detections as the object is re-evaluated by the machine learning algorithm.
- Draw multiple lines to extend the coverage of a line.
You can draw multiple, overlapping detection lines to improve the detection of objects that do not take the ideal path.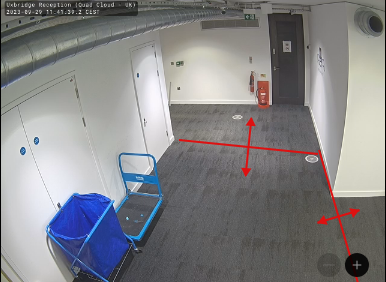
Draw multiple connected lines to extend the areas covered by the line-crossing